CSMA is a basic method that controls the communication of multiple participants on a shared and decentralized transmission medium. CSMA/CA is mainly used in wireless networks.
Components of CMSA/CA include:
1)Carrier sense (CA): The initial idea is that participants
may only send data over the network if the transmission medium
is free. The carrier status detection checks the channel any
time, and data is not sent until it’s available.
2)Multiple access (MA): Several stations share a transmission
medium. It is crucial for functioning communication that all
of them adhere to a binding protocol.
3)Collision avoidance (CA): A complex schedule tries to ensure
that two or more participants do not start a transmission at
the same time to avoid collisions. If overlapping does occur,
this will be detected and the transmission will be tried
again.
The most important rule, which you’ll know from communication
situations when there are several participants is only one
person may send their information at once. Else, "collisions"
of data packets is said to occur.
CSMA/CA tries to reduce the frequency of these collisions and
provide a plan at the same time on how to proceed if a
collision does occur.
The basic idea behind CSMA/CA is the “Listen Before Talk” (LBT) principle.
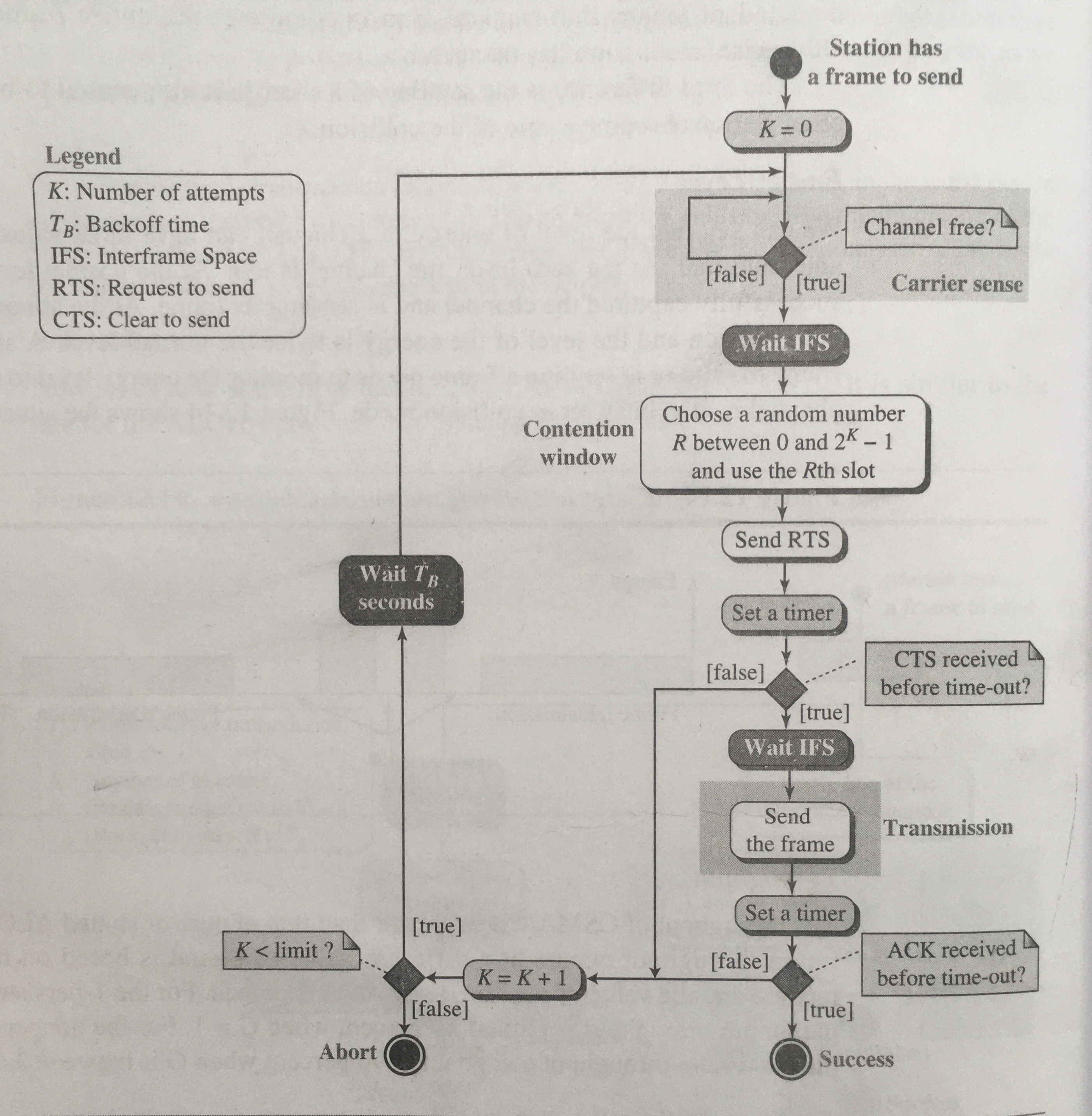
Within CSMA/CA, the distributed coordination function (DCF) controls the time a station waits before initiating transmission in a free medium. DCF also assigns certain time slots to network participants for further actions, creating a binding time structure. This procedure is the focus of collision avoidance: a complex time structure that makes it possible to avoid collisions. DCF takes various intervals into account when creating the time structure. DCF interframe space (DIFS): In the first step, participants must monitor the network for the duration of the DIFS to determine whether it’s currently free. For CSMA/CA, this means that no other station within range is sending out a transmission at the same time. The DIFS results from the SIFS almost double the slot time, which is between 28 and 50 µs long. Contention window: If participants determine that the channel is free, they wait a random amount of time before they start sending. This duration corresponds to the contention window. This time window doubles with each collision and corresponds to the binary exponential backoff (BEB) that is familiar from CSMA/CD. Short interframe space (SIFS): After sending the data packet, the recipient node sends a notification – if the RTS/CTS procedure is also utilized. However, this station also waits for a fixed time before sending. SIFS is the time it takes to process a data package. The duration depends on the IEEE-802.11 standard and is between 10 µs and 16 µs.
The frames “Request to Send” (RTS) and “Clear to Send” (CTS) are part of the optional extension CSMA/CA RTS/CTS. This procedure is upstream of the actual data transmission. If a participant determines that the transmission medium is free, the device first sends an RTS frame to the participant that is to receive the data. With this, the output computer makes it clear that it wants to start a transmission and will occupy the transmission medium for a certain time.